In 2018, I decided to compete with a newly designed mini sumo robot in RobotSM. Last years I used a chassis from Fingertech Robotics but this year I wanted to do a complete remake.





Specification
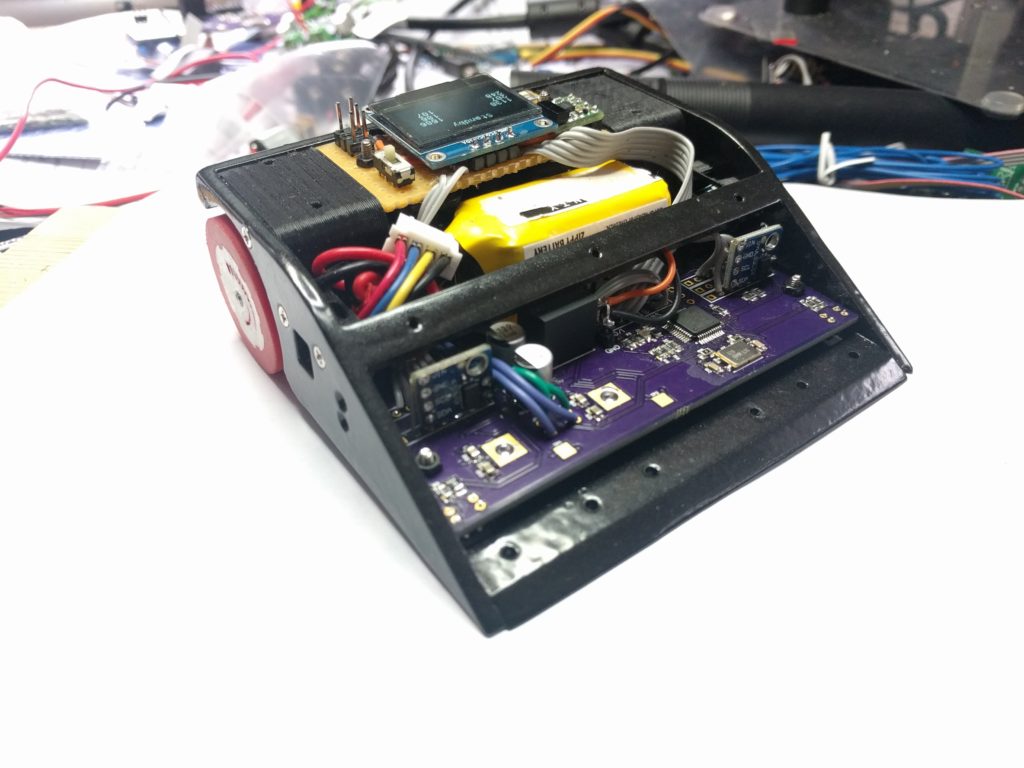
- 5 Time-of-Flight laser-ranging modules, VL53L0X
- 3 reflective sensors mounted from below for detecting the play area
- 2 Spark motors from FingerTech Robotics
- 2 sumo wheels from Fingertech Robotics
- 1.5 mm laser cut steel chassis and some 3D printed parts
- 360mAh@7.2VLiPo battery
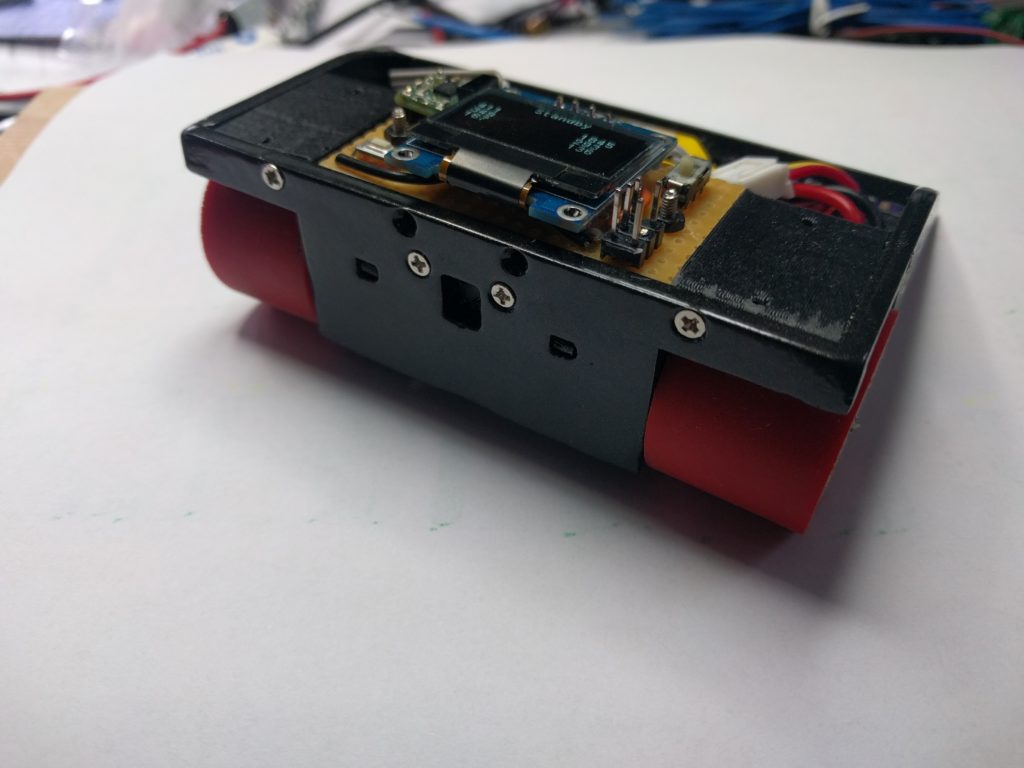
- 128×64 OLED display (very useful for debugging!)
- 2 MC33886, H-bridge
- MCU, STM32F4xx
Summary
So, I guess the main question is if I won the competition? No, I ended up at the bottom of the list. My robot did not stand a chance against those robots that have evolved under many years of competing. I think I might have won like max one set. Despite the result, it was great fun and gave me lot of ideas how to improve the robot, e.g. I need a quicker robot and the sensors for detecting the opponent will need a much shorter response time. But I save those improvements for a rainy day…